Εισάγετε μια λέξη ή φράση σε οποιαδήποτε γλώσσα 👆
Γλώσσα:
Μετάφραση και ανάλυση λέξεων από την τεχνητή νοημοσύνη ChatGPT
Σε αυτήν τη σελίδα μπορείτε να λάβετε μια λεπτομερή ανάλυση μιας λέξης ή μιας φράσης, η οποία δημιουργήθηκε χρησιμοποιώντας το ChatGPT, την καλύτερη τεχνολογία τεχνητής νοημοσύνης μέχρι σήμερα:
- πώς χρησιμοποιείται η λέξη
- συχνότητα χρήσης
- χρησιμοποιείται πιο συχνά στον προφορικό ή γραπτό λόγο
- επιλογές μετάφρασης λέξεων
- παραδείγματα χρήσης (πολλές φράσεις με μετάφραση)
- ετυμολογία
кибернетика - translation to Αγγλικά
НАУКА ОБ ОБЩИХ ЗАКОНОМЕРНОСТЯХ ПОЛУЧЕНИЯ, ХРАНЕНИЯ, ПРЕОБРАЗОВАНИЯ И ПЕРЕДАЧИ ИНФОРМАЦИИ В СЛОЖНЫХ УПРАВЛЯЮЩИХ СИСТЕМАХ
Кибернетик; Кибернетическое устройство; Кибернетическая машина; Кибернетическая система



![[[ASIMO]] использует датчики и интеллектуальные алгоритмы, чтобы избежать препятствий и перемещаться по лестнице](https://commons.wikimedia.org/wiki/Special:FilePath/Honda ASIMO Walking Stairs.JPG?width=200 "[[ASIMO]] использует датчики и интеллектуальные алгоритмы, чтобы избежать препятствий и перемещаться по лестнице")
![[[Искусственное сердце]], пример биомедицинской инженерии.](https://commons.wikimedia.org/wiki/Special:FilePath/JARVIK 7 artificial heart.jpg?width=200 "[[Искусственное сердце]], пример биомедицинской инженерии.")

![система]].](https://commons.wikimedia.org/wiki/Special:FilePath/Model Cybernetic Factory.svg?width=200 "система]].")



кибернетика
f.
cybernetics
cybernetics
cybernetist
[saibə'netist]
существительное
общая лексика
кибернетик
cybernetician
PERSON WHO PRACTICES OR IS EDUCATED WITHIN CYBERNETICS
Cybor; Cybernetician
['saibə:nə'tiʃ(ə)nsaibə'netisist]
существительное
общая лексика
кибернетик
Ορισμός
Кибернетика
I
Киберне́тика (от греч. kybernetike - искусство управления, от kybernáo - правлю рулём, управляю)
наука об управлении, связи и переработке информации (См. Информация).
Предмет кибернетики. Основным объектом исследования в К. являются так называемые кибернетические системы. В общей (или теоретической) К. такие системы рассматриваются абстрактно, безотносительно к их реальной физической природе. Высокий уровень абстракции позволяет К. находить общие методы подхода к изучению систем качественно различной природы, например технических, биологических и даже социальных.
Абстрактная кибернетическая система представляет собой множество взаимосвязанных объектов, называемых элементами системы, способных воспринимать, запоминать и перерабатывать информацию, а также обмениваться информацией. Примерами кибернетических систем могут служить разного рода автоматические регуляторы в технике (например, автопилот или регулятор, обеспечивающий поддержание постоянной температуры в помещении), электронные вычислительные машины (ЭВМ), человеческий мозг, биологические популяции, человеческое общество.
Элементы абстрактной кибернетической системы представляют собой объекты любой природы, состояние которых может быть полностью охарактеризовано значениями некоторого множества параметров. Для подавляющего большинства конкретных приложений К. оказывается достаточным рассматривать параметры двух родов. Параметры 1-го рода, называемые непрерывными, способны принимать любые вещественные значения на том или ином интервале, например на интервале от - 1 до 2 или от -∞ до +∞. Параметры 2-го рода, называемые дискретными, принимают конечные множества значений, например значение, равное любой десятичной цифре, значения "да" или "нет" и т.п.
С помощью последовательностей дискретных параметров можно представить любое целое или рациональное число. Вместе с тем дискретные параметры могут служить и для оперирования величинами качественной природы, которые обычно не выражаются числами. Для этой цели достаточно перечислить и как-то обозначить (например, по пятибалльной системе) все различимые состояния соответствующей величины. Таким образом могут быть охарактеризованы и введены в рассмотрение такие факторы, как темперамент, настроение, отношение одного человека к другому и т.п. Тем самым область приложений кибернетических систем и К. в целом расширяется далеко за пределы строго "математизированных" областей знаний.
Состояние элемента кибернетической системы может меняться как самопроизвольно, так и под воздействием тех или иных входных сигналов, получаемых им извне (из-за пределов рассматриваемой системы), либо от других элементов системы. В свою очередь каждый элемент системы может формировать выходные сигналы, зависящие в общем случае от состояния элемента и воспринимаемых им в рассматриваемый момент времени входных сигналов. Эти сигналы либо передаются на др. элементы системы (служа для них входными сигналами), либо входят в качестве составной части в передаваемые за пределы системы выходные сигналы всей системы в целом.
Организация связей между элементами кибернетической системы носит название структуры этой системы. Различают системы с постоянной и переменной структурой. Изменения структуры задаются в общем случае как функция от состояний всех составляющих систему элементов и от входных сигналов всей системы в целом.
Таким образом, описание знаков функционирования системы задается тремя семействами функций: функций, определяющих изменения состояний всех элементов системы, функций, задающих их выходные сигналы, и, наконец, функций, вызывающих изменения в структуре системы. Система называется детерминированной, если все эти функции являются обычными (однозначными) функциями. Если же все эти функции, или хотя бы часть их, представляют собой случайные функции, то система носит название вероятностной, или стохастической. Полное описание кибернетической системы получается, если к указанному описанию знаков функционирования системы добавляется описание её начального состояния, т. е. начальной структуры системы и начальных состояний всех её элементов.
Классификация кибернетических систем. Кибернетические системы различаются по характеру циркулирующих в них сигналов. Если все эти сигналы, равно как и состояние всех элементов системы, задаются непрерывными параметрами, система называется непрерывной. В случае дискретности всех этих величин говорят о дискретной системе. В смешанных, или гибридных, системах приходится иметь дело с обоими типами величин.
Разделение кибернетических систем на непрерывные и дискретные является до известной степени условным. Оно определяется глубиной проникновения в предмет, требуемой точностью его изучения, а иногда и удобством использования для целей изучения системы того или иного математического аппарата. Так, например, хорошо известно, что свет имеет дискретную, квантовую природу. Тем не менее, такие параметры, как величина светового потока, уровень освещенности и др. принято обычно характеризовать непрерывными величинами поскольку, постольку обеспечена возможность достаточно плавного их изменения. Другой пример - обычный проволочный реостат. Хотя величина его сопротивления меняется скачкообразно, при достаточной малости этих скачков оказывается возможным и удобным считать изменение непрерывным.
Обратные примеры еще более многочисленны. Так, выделительная функция почки на обычном (неквантовом) уровне изучения является непрерывной величиной. Однако во многих случаях довольствуются пятибалльной характеристикой этой функции, рассматривая ее тем самым как дискретную величину. Более того, при любом фактическом вычислении значения непрерывных параметров приходится ограничиваться определенной точностью вычислений. А это означает, что соответствующая величина рассматривается как дискретная.
Последний пример показывает, что дискретный способ представления величин является универсальным способом, ибо имея в виду недостижимость абсолютной точности измерений, любые непрерывные величины сводятся в конечном счете к дискретным. Обратное сведение для дискретных величин, принимающих небольшое число различных значений, не может привести к удовлетворительным (с точки зрения точности представления) результатам и поэтому на практике не употребляется. Таким образом, дискретный способ представления величины является в определённом смысле более общим, чем непрерывный.
Разделение кибернетических систем на непрерывные и дискретные имеет большое значение с точки зрения используемого для их изучения математического аппарата. Для непрерывных систем таким аппаратом является обычно теория систем обыкновенных дифференциальных уравнений, для дискретных систем - Алгоритмов теория и Автоматов теория. Ещё одной базовой математической теорией, используемой как в случае дискретных, так и в случае непрерывных систем (и развивающейся соответственно в двух аспектах), является Информации теория.
Сложность кибернетических систем определяется двумя факторами. Первый фактор - это так называемая размерность системы, т. е. общее число параметров, характеризующих состояния всех её элементов. Второй фактор - сложность структуры системы, определяющаяся общим числом связей между ее элементами и их разнообразием. Простая совокупность большого числа не связанных между собой элементов с повторяющимися от элемента к элементу простыми связями, ещё не составляет сложной системы. Сложные (большие) кибернетические системы - это системы с описаниями, не сводящимися к описанию одного элемента и указанию общего числа таких (однотипных) элементов.
При изучении сложных кибернетических систем, помимо обычного разбиения системы на элементы, используется метод укрупнённого представления систем в виде совокупности отдельных блоков, каждый из которых является отдельной системой. При изучении систем большой сложности употребляется целая иерархия подобных блочных описаний: на верхнем уровне такой иерархии вся система рассматривается как один блок, на нижнем уровне в качестве составляющих системы блоков выступают отдельные элементы системы.
Необходимо подчеркнуть, что само понятие элемента системы является до известной степени условным, зависящим от ставящихся при изучении системы целей и от глубины проникновения в предмет. Так, при феноменологическом подходе изучения мозга, когда предметом изучения является не строение мозга, а выполняемые им функции, мозг может рассматриваться как один элемент, хотя и характеризуемый достаточно большим числом параметров. Обычный подход заключается в том, что в качестве составляющих мозг элементов выступают отдельные нейроны. При переходе на клеточный или молекулярный уровень каждый нейрон может, в свою очередь, рассматриваться как сложная кибернетическая система и т.д.
Если обмен сигналами между элементами системы полностью замыкается в ее пределах, то система называется изолированной или замкнутой. Рассматриваемая как один элемент, такая система не имеет ни входных, ни выходных сигналов. Открытые системы в общем случае имеют как входные, так и выходные каналы, по которым они обмениваются сигналами с внешней средой. Предполагается, что всякая открытая кибернетическая система снабжена рецепторами (датчиками), воспринимающими сигналы из внешней среды и предающими их внутрь системы. В случае, когда в качестве рассматриваемой кибернетической системы выступает человек, такими рецепторами являются различные органы чувств (зрение, слух, осязание и др.). Выходные сигналы системы передаются во внешнюю среду через посредство эффекторов (исполнительных механизмов), в качестве которых в рассматриваемом случае выступают органы речи, мимика, руки и др.
Поскольку каждая система сигналов, независимо от того, формируется она разумными существами или объектами и процессами неживой природы, несет в себе ту или иную информацию, то всякая открытая кибернетическая система, равно как и элементы любой системы (открытой или замкнутой), может рассматриваться как преобразователь информации. При этом понятие информации рассматривается в очень общем смысле, близком к физическому понятию энтропии (см. Информация в кибернетике).
Кибернетический подход к изучению объектов различной природы. Рассмотрение различных объектов живой и неживой природы как преобразователей информации или как систем, состоящих из элементарных преобразователей информации, составляет сущность так называемого кибернетического подхода к изучению этих объектов. Этот подход (равно как и подход со стороны др. фундаментальных наук - механики, химии и тому подобное) требует определенного уровня абстракции. Так, при кибернетическом подходе к изучению мозга как системы нейронов обычно отвлекаются от их размеров, формы, химического строения и др. Предметом изучения становятся состояния нейронов (возбужденное или нет), вырабатываемые ими сигналы, связи между нейронами и законы изменения их состояний.
Простейшие преобразователи информации могут осуществлять преобразование информации лишь одного определённого вида. Так, например, исправный дверной звонок при нажатии кнопки (рецептора) отвечает всегда одним и тем же действием - звонком или гудением зуммера. Однако, как правило, сложные кибернетические системы обладают способностью накапливать информацию в той или иной форме и в зависимости от этого менять выполняемые ими действия (преобразование информации). По аналогии с человеческим мозгом подобное свойство кибернетических систем называют иногда памятью.
"Запоминание" информации в кибернетических системах может производиться двумя основными способами - либо за счет изменения состояний элементов системы, либо за счет изменения структуры системы (возможен, разумеется, смешанный вариант). Между этими двумя видами "памяти" по существу нет принципиальных различий. В большинстве случаев это различие зависит лишь от принятого подхода к описанию системы. Например, одна из современных теорий объясняет долговременную память человека изменениями проводимости синаптических контактов, т. е. связей между отдельными составляющими мозг нейронами. Если в качестве элементов, составляющих мозг, рассматриваются лишь сами нейроны, то изменение синаптических контактов следует рассматривать как изменение структуры мозга. Если же наряду с нейронами в число составляющих мозг элементов включить и все синаптические контакты (независимо от степени их проводимости), то рассматриваемое явление сведется к изменению состояния элементов при неизменной структуре системы.
ЭВМ как преобразователи информации. Из числа сложных технических преобразователей информации наибольшее значение для К. имеют ЭВМ. В более простых вычислительных машинах - цифровых электромеханических или аналоговых - перенастройка на различные задачи осуществляется с помощью изменения системы связей между элементами на специальной коммутационной панели. В современных универсальных ЭВМ такие изменения производятся с помощью "запоминания" машиной в специальном устройстве, накапливающем информацию, той или иной программы её работы.
В отличие от аналоговых машин, оперирующих с непрерывной информацией, современные ЭВМ имеют дело с дискретной информацией. На входе и выходе ЭВМ в качестве такой информации могут выступать любые последовательности десятичных цифр, букв знаков препинания и др. символов. Внутри машины эта информация обычно представляется (или, как говорят, кодируется) в виде последовательности сигналов, принимающих лишь два различных значения.
В то время как возможности аналоговых машин (равно как и любых других искусственно созданных устройств) ограничены преобразованиями строго ограниченных типов, современные ЭВМ обладают свойством универсальности. Это означает, что любые преобразования буквенно-цифровой информации, которые могут быть определены произвольной конечной системой правил любой природы (арифметических, грамматических и др.) могут быть выполнены ЭВМ после введения в нее составленной должным образом программы. Эта способность ЭВМ достигается за счет универсальности ее системы команд, т. е. элементарных преобразований информации, которые закладываются в структуру ЭВМ. Подобно тому, как из одних и тех же деталей собираются любые дома, из элементарных преобразований могут складываться любые, сколь угодно сложные преобразования буквенно-цифровой информации. Программа ЭВМ как раз и представляет собой последовательность таких элементарных преобразований.
Свойство универсальности ЭВМ не ограничивается одной лишь буквенно-цифровой информацией. Как показывается в теории кодирования (См. Кодирование), в буквенно-цифровой (и даже просто цифровой) форме может быть представлена (закодирована) любая дискретная информация, а также - с любой заданной степенью точности - произвольная непрерывная информация. Таким образом, современные ЭВМ могут рассматриваться как универсальные преобразователи информации. Другим известным примером универсального преобразователя информации (хотя и основанного на совершенно иных принципах) является человеческий мозг.
Свойство универсальности современных ЭВМ открывает возможность моделирования с их помощью любых др. преобразователей информации, в том числе любых мыслительных процессов. Такая возможность ставит ЭВМ в особое положение: с момента своего возникновения они представляют основное техническое средство, основной аппарат исследования, которым располагает К.
Управление в кибернетических системах. В рассмотренных до сих пор случаях изменение поведения ЭВМ определялось человеком, меняющим программы ее работы. Можно, однако составить программу изменения программы работ ЭВМ и организовать ее общение с внешней средой через соответствующую систему рецепторов и эффекторов. Таким образом, можно моделировать различные формы изменения поведения и развития, наблюдающиеся в сложных биологических и социальных системах. Изменение поведения сложных кибернетических систем есть результат накопления обработанной соответствующим образом информации, которую эти системы получили в прошлом.
В зависимости от формы, в которой происходит "запоминание" информации, различают два основных типа изменения поведения систем - самонастройку и самоорганизацию. В самонастраивающихся системах накопление опыта выражается в изменении значений тех или иных параметров, в самоорганизующихся - в изменении структуры системы. Как указывалось выше, это различие является до некоторой степени условным, зависящим от способа разбиения системы на элементы. На практике обычно самонастройка связывается с изменениями относительно небольшого числа непрерывных параметров. Что же касается глубоких изменений структуры рабочих программ ЭВМ (которые можно трактовать как изменения состояний большого числа дискретных элементов памяти), то их более естественно рассматривать как пример самоорганизации.
Целенаправленное изменение поведения кибернетических систем происходит при наличии управления. Цели управления сильно меняются в зависимости от типа систем и степени их сложности. В простейшем случае такой целью может быть поддержание постоянства значения того или иного параметра. Для более сложных систем в качестве целей возникают задачи приспособления к меняющейся среде и даже познания законов таких изменений.
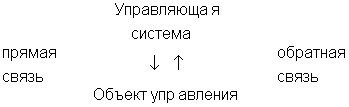
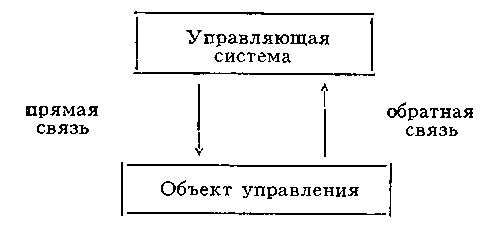
Наличие управления в кибернетической системе означает, что её можно представить в виде двух взаимодействующих блоков - объекта управления и управляющей системы. Управляющая система по каналам прямой связи через соответствующее множество эффекторов передает управляющие воздействия на объект управления. Информация о состоянии объекта управления воспринимается с помощью рецепторов и передаётся по каналам обратной связи в управляющую систему (см. схему)
Описанная система с управлением может, как и всякая кибернетическая система, иметь также каналы связи (с соответствующими системами рецепторов и эффекторов) с окружающей средой. В простейших случаях среда может выступать как источник различных помех и искажений в системе (чаще всего в канале обратной связи). В задачу управляющей системы входит тогда фильтрация помех. Особо важное значение эта задача приобретает при дистанционном (телемеханическом) управлении, когда сигналы передаются по длинным каналам связи. Основной задачей управляющей системы является такое преобразование поступающей в систему информации и формирование таких управляющих воздействий, при которых обеспечивается достижение (по возможности наилучшее) целей управления. По виду таких целей и характеру функционирования управляющей системы различают следующие основные типы управления.
Одним из простейших видов управления является т. н. Программное управление. Цель такого управления состоит в том, чтобы выдать на объект управления ту или иную строго определенную последовательность управляющих воздействий. Обратная связь при таком управлении отсутствует. Наиболее простым примером подобного программного управления является светофор-автомат, переключение которого происходит в заданные заранее моменты времени. Более сложное управление светофором (при наличии счетчиков подъезжающих машин) может включать простейший "пороговый" сигнал обратной связи: переключение светофора происходит всякий раз, когда количество ждущих автомашин превысит заданную величину.
Весьма простым видом управления является также классическое авторегулирование (см. Автоматическое управление), цель которого состоит в поддержании постоянного значения того или иного параметра (или нескольких независимых параметров). Примером может служить система автоматического регулирования температуры воздуха в помещении: специальный термометр-датчик измеряет температуру воздуха Т, управляющая система сравнивает эту температуру с заданной величиной То и формирует управляющее воздействие - k (T - То) на задвижку, регулирующую приток тёплой воды в батареи центрального отопления. Знак минус при коэффициенте k означает, что регулирование происходит по закону отрицательной обратной связи, а именно: при увеличений температуры Т выше установленного порога То приток тепла уменьшается, при её падении ниже порога - возрастает. Отрицательная обратная связь необходима для обеспечения устойчивости процесса регулирования. Устойчивость системы означает, что при отклонении от положения равновесия (когда Т = То) как в одну, так и в другую сторону система стремится автоматически восстановить это равновесие. При простейшем предположении о линейном характере зависимости между управляющим воздействием и скоростью притока тепла в помещение работа такого регулятора описывается дифференциальным уравнением dT/dt = - k (T - То), решением которого служит функция Т = То + δ-e-kt, где δ - отклонение температуры Т от заданной величины То в начальный момент времени. Поскольку рассмотренная система описывается линейным дифференциальным уравнением 1-го порядка, она носит название линейной системы 1-го порядка. Более сложным поведением обладают линейные системы 2-го и более высоких порядков и особенно нелинейные системы.
Возможны системы, в которых принцип программного управления комбинируется с задачей регулирования в смысле поддержания устойчивого значения той или иной величины. Так, например, в описанный регулятор комнатной температуры может быть встроено программное устройство, меняющее значение регулируемого параметра. Задачей такого устройства может быть, скажем, поддержание температуры +20 °С в дневное время и снижение её до +16°С в ночные часы. Функция простого регулирования перерастает здесь в функцию слежения за значением программно изменяемого параметра.
В более сложных следящих системах задача состоит в поддержании (возможно более точном) некоторой фиксированной функциональной зависимости между множеством самопроизвольно меняющихся параметров и заданным множеством регулируемых параметров. Примером может служить система, непрерывно сопровождающая лучом прожектора маневрирующий произвольным образом самолет.
В т. н. системах оптимального управления (См. Оптимальное управление) основной целью является поддержание максимального (или минимального) значения некоторой функции от двух групп параметров, называемой критерием оптимального управления. Параметры первой группы (внешние условия) меняются независимо от системы, параметры второй группы являются регулируемыми, т. е. их значения могут меняться под воздействием управляющих сигналов системы.
Простейший пример оптимального управления снова даёт задача регулирования температуры комнатного воздуха при дополнительном условии учёта изменений его влажности. Величина температуры воздуха, дающая ощущение наибольшего комфорта, зависит от его влажности. Если влажность всё время меняется, а система может управлять лишь изменением температуры, то естественно в качестве цели управления поставить задачу поддержания температуры, которая давала бы ощущение наибольшего комфорта. Это и будет задача оптимального управления. Системы оптимального управления имеют большое значение в задачах управления экономикой.
В простейшем случае оптимальное управление может сводиться к задаче поддержания наибольшего (или наименьшего) возможного при заданных условиях значения регулируемого параметра. В этом случае говорят о системах экстремального регулирования.
В случае, когда нерегулируемые параметры в системе оптимального управления на том или ином отрезке времени меняются, функция системы сводится к поддержанию таких постоянных значений регулируемых параметров, которые обеспечивают максимизацию (или минимизацию) соответствующего критерия оптимального управления. Здесь, как и в случае обычного регулирования, возникает задача устойчивости управления. При проектировании относительно несложных систем подобная устойчивость достигается за счет соответствующего выбора параметров проектируемой системы. В более сложных случаях, когда количество возмущающих воздействий и размерность системы очень велики, иногда оказывается удобным для достижения устойчивости прибегать к самонастройке и самоорганизации систем. При этом некоторая часть параметров, определяющая характер существующих в системе связей, не фиксируется заранее и может изменяться системой в процессе ее функционирования. Система имеет специальный блок, регистрирующий характер переходных процессов в системе при выведении ее из равновесия. При обнаружении неустойчивости переходного процесса система меняет значения параметров связей, пока не добьётся устойчивости. Системы такого рода принято называть ультраустойчивыми.
При большом числе изменяемых параметров связей случайный поиск устойчивых режимов может занимать слишком много времени. В таком случае применяются те или иные способы ограничения случайного перебора, например разбиение параметров связей на группы и осуществление перебора лишь внутри одной группы (определяемой по тем или иным признакам). Такого рода системы называют обычно мультиустойчивыми. Большое разнообразие ультраустойчивых и мультиустойчивых систем дает биология. Примером может служить система регулирования температуры крови у человека и теплокровных животных.
Задача группировки внешних воздействий, необходимая для успешного выбора способа самонастройки в мультиустойчивых системах, входит в число задач узнавания, или, иначе, задач распознавания образов (См. Распознавание образов). Для определения типа поведения (способа управления) у человека особую роль играют зрительные и звуковые образы. Возможность их распознавания и объединения в те или иные классы позволяет человеку создавать абстрактные понятия, являющиеся непременным условием сознательного познания действительности и началом абстрактного мышления. Абстрактное мышление позволяет создавать в управляющей системе (в данном случае в человеческом мозге) модели различных процессов, осуществлять с их помощью экстраполяцию действительности и определять свои действия на основе такой экстраполяции.
Таким образом, на высших уровнях иерархии управляющих систем задачи управления оказываются тесно переплетенными с задачами познания окружающей действительности. В чистом виде эти задачи проявляются в абстрактных познающих системах, также являющихся одним из классов кибернетических систем.
Существенное место в К. занимает Надёжности теория кибернетических систем. Её задачей является разработка методов построения систем, обеспечивающих правильное функционирование систем при выходе из строя части их элементов, разрыве тех или иных связей и др. возможных случайных сбоях или неисправностях.
Методы кибернетики. Имея в качестве основного объекта исследования кибернетические системы, К. использует для их изучения три принципиально различных метода. Два из них - математико-аналитический и экспериментальный - широко применяются и в др. науках. Сущность первого состоит в описании изучаемого объекта в рамках того или иного математического аппарата (например, в виде системы уравнений) и последующего извлечения различных следствий из этого описания путем математической дедукции (например, путем решения соответствующей системы уравнений). Сущность второго метода состоит в проведении различных экспериментов либо с самим объектом, либо с его реальной физической моделью. В случае уникальности исследуемого объекта и невозможности существенного влияния на него (как, например, в случае Солнечной системы или процесса биологической эволюции) активный эксперимент переходит в пассивное наблюдение.
Одним из важнейших достижений К. является разработка и широкое использование нового метода исследования, получившего название математического (машинного) эксперимента, или математического моделирования. Смысл его состоит в том, что эксперименты производятся не с реальной физической моделью изучаемого объекта, а с его описанием. Описание объекта вместе с программами, реализующими изменения характеристик объекта в соответствии с этим описанием, помещается в память ЭВМ, после чего становится возможным проводить с объектом различные эксперименты: регистрировать его поведение в тех или иных условиях, менять те или иные элементы описания и тому подобное. Огромное быстродействие современных ЭВМ зачастую позволяет моделировать многие процессы в более быстром темпе, чем они происходят в действительности.
Первым этапом математического моделирования является разбиение изучаемой системы на отдельные блоки и элементы и установление связей между ними. Эту задачу решает так называемый системный анализ. В зависимости от целей исследования глубина и способ такого разбиения могут варьироваться. В этом смысле системный анализ представляет собой скорее искусство, чем точную науку, ибо при анализе действительно сложных систем приходится априори отбрасывать несущественные (с точки зрения поставленной цели) детали и связи.
После разбиения системы на части и характеристики их теми или иными множествами параметров (количественных или качественных) для установления связи между ними привлекают обычно представителей различных наук. Так, при системном анализе человеческого организма типичные связи имеют следующую форму: "При переходе органа А из состояния k1 в состояние k2 и сохранении органа В в состоянии М орган С через N месяцев с вероятностью р перейдёт из состояния n1 в состояние n2". В зависимости от вида органов, к которым относится указанное высказывание, оно может быть сделано эндокринологом, кардиологом, терапевтом и др. специалистами. В результате их совместной работы возникает комплексное описание организма, представляющее искомую математическую модель.
Так называемые системные программисты переводят эту модель в машинное представление, программируя одновременно средства, необходимые для экспериментов с ней. Проведение самих экспериментов и получение различных выводов из них составляют предмет операций исследования (См. Операций исследование). Впрочем, исследователи операций в случае, когда это оказывается возможным, могут применить дедуктивно-математические построения и даже воспользоваться натурными моделями всей системы или ее отдельных частей. Задача построения натурных моделей, равно как и задача проектирования и изготовления различных искусственных кибернетических систем, относится к области системотехники.
Историческая справка. Первым, кто применил термин К. для управления в общем смысле, был по-видимому, древнегреческий философ Платон. Однако реальное становление К. как науки произошло много позже. Оно было предопределено развитием технических средств управления и преобразования информации. Ещё в средние века в Европе стали создавать так называемые андроиды - человекоподобные игрушки, представляющие собой механические, программно управляемые устройства.
Первые промышленные регуляторы уровня воды в паровом котле и скорости вращения вала паровой машины были изобретены И. И. Ползуновым (Россия) и Дж. Уаттом (Англия). Во 2-й половине 19 в. требовалось построение все более совершенных автоматических регуляторов. Наряду с механическими блоками в них всё чаще начинают применяться электромеханические и электронные блоки. Большую роль в развитии теории и практики автоматического регулирования сыграло изобретение в начале 20 в. дифференциальных анализаторов, способных моделировать и решать системы обыкновенных дифференциальных уравнений. Они положили начало быстрому развитию аналоговых вычислительных машин и их широкому проникновению в технику.
Немалое влияние на становление К. оказали успехи нейрофизиологии и особенно классические труды И. П. Павлова по условным рефлексам. Можно отметить также оригинальные работы украинского учёного Я. И. Грдины по динамике живых организмов.
В 30-х гг. 20 в. все большее влияние на становление К. начинает оказывать развитие теории дискретных преобразователей информации. Два основных источника идей и проблем направляли это развитие. Во-первых, задача построения оснований математики. Еще в середине прошлого века Дж. Буль заложил основы современной математический логики. В 20-е гг. 20 в. были заложены основы современной теории алгоритмов. В 1934 К. Гёдель показал ограниченность возможностей замкнутых познающих систем. В 1936 А. М. Тьюринг описал гипотетический универсальный преобразователь дискретной информации, получивший впоследствии назв. Тьюринга машины (См. Тьюринга машина). Эти два результата, будучи полученными в рамках чистой математики, оказали и продолжают оказывать огромное влияние на становление основных идей К.
Вторым источником идей и проблем К. служила практика создания реальных дискретных преобразователей информации. Простейший механический арифмометр был изобретён Б. Паскалем (См. Паскаль) (Франция) ещё в 17 в. Лишь в 19 в. Ч. Беббидж (Англия) предпринял первую попытку создания автоматического цифрового вычислителя - прообраза современной ЭВМ. К началу 20 века были созданы первые образцы электромеханических счетно-аналитических машин, позволивших автоматизировать простейшие преобразования дискретной информации. Резкое усиление интереса к теории дискретных преобразователей информации в 30-х гг. было обусловлено необходимостью создания сложных релейно-контактных устройств, прежде всего для нужд автоматических телефонных станций. В 1938 К. Шеннон (США), а в 1941 В. И. Шестаков (СССР) показали возможность использования для синтеза и анализа релейно-контактных схем аппарата математической логики. Тем самым было положено начало развитию современной теории автоматов.
Решающее значение для становления К. имело создание в 40-х гг. 20 в. электронных вычислительных машин (Дж. фон Нейман и др.). Благодаря ЭВМ возникли принципиально новые возможности для исследования и фактического создания действительно сложных управляющих систем. Оставалось объединить весь полученный к этому времени материал и дать название новой науке. Этот шаг был сделан Н. Винером, опубликовавшим в 1948 свою знаменитую книгу "Кибернетика".
Н. Винер предложил называть К. "науку об управлении и связи в животном и машине". В первой и во второй своей книге ("Кибернетика и общество", 1954) Винер уделил большое внимание общефилософским и социальным аспектам новой науки, трактуя их зачастую весьма произвольно. В результате дальнейшее развитие К. пошло двумя различными путями. В США и Западной Европе стало преобладать узкое понимание К., концентрирующее внимание на спорах и сомнениях, поднятых Винером, на аналогиях между процессами управления в технических средствах и живых организмах. В СССР после первоначального периода отрицания и сомнений утверждалось более естественное и содержательное определение К., включившее в нее все достижения, накопленные к тому времени в теории преобразования информации и управляющих систем. При этом особое внимание уделялось новым проблемам, возникающим в связи с широким внедрением ЭВМ в теорию управления и теорию преобразования информации.
На Западе подобные вопросы развивались в рамках специальных разделов науки, получивших название "информатика", "вычислительная наука", "системный анализ" и др. Лишь к концу 60-х гг. Наметилась тенденция расширения понятия К. и включения в неё всех указанных разделов.
Основные разделы кибернетики. Современная К. в широком понимании состоит из большого количества разделов, представляющих собой самостоятельные научные направления. Теоретическое ядро К. составляют такие разделы, как теория информации, теория кодирования, теория алгоритмов и автоматов, общая теория систем, теория оптимальных процессов, методы исследования операций, теория распознавания образов, теория формальных языков. На практике центр тяжести интересов К. сместился в область создания сложных систем управления и различного рода систем для автоматизации умственного труда. В чисто познавательном плане одной из наиболее интересных перспективных задач К. является моделирование мозга и его различных функций.
Основным техническим средством для решения всех указанных задач являются ЭВМ. Поэтому развитие К. как в теоретическом, так и в практическом аспектах тесно связано с прогрессом электронной вычислительной техники. Требования, которые предъявляет К. к развитию своего математического аппарата, определяются указанными выше основными практическими задачами.
Определённая практическая целенаправленность исследований по развитию математического аппарата как раз и является той гранью, которая отделяет общематематическую от собственно кибернетической части подобных исследований. Так, например, в той части теории алгоритмов, которая строится для нужд оснований математики, стремятся по возможности уменьшить число типов элементарных операций и сделать их достаточно мелкими. Возникающие таким образом алгоритмические языки удобны как объект исследования, но в то же время ими практически неудобно пользоваться для описания реальных задач преобразования информации. Кибернетический аспект теории алгоритмов имеет дело с алгоритмическими языками, специально ориентированными на те или иные классы подобных практических задач. Имеются языки, ориентированные на задачи вычислительного характера, на формульные преобразования, на обработку графической информации и т.п.
Аналогичное положение имеет место и в др. разделах, составляющих общетеоретический фундамент К. Они представляют собой аппарат для решения практических задач изучения кибернетических систем, их анализа и синтеза, нахождения оптимального управления.
Особенно большое значение применение кибернетических методов имеет в тех науках, где методы классической математики могут применяться лишь в ограниченных масштабах, для решения отдельных частных задач. К числу таких наук относятся в первую очередь экономика, биология, медицина, языкознание и те области техники, которые имеют дело с большими системами. В результате большого объёма применения кибернетических методов в этих науках произошло выделение самостоятельных научных направлений, которые было бы естественно называть кибернетической экономикой, кибернетической биологией и т.д. Однако в силу ряда причин первоначальное становление указанных направлений происходило в рамках К. за счет специализации объектов исследования, а не в рамках соответствующих наук за счёт применения методов и результатов К. Поэтому указанные направления получили назв. Кибернетика экономическая, Кибернетика биологическая, Кибернетика медицинская, Кибернетика техническая. В языкознании соответствующее научное направление получило наименование математической лингвистики (См. Математическая лингвистика).
Задачи реального создания сложных управляющих систем (в первую очередь в экономике), а также основанных на использовании ЭВМ сложных справочно-информационных систем, систем автоматизации проектирования, систем для автоматизации сбора и обработки экспериментальных данных и др. относятся обычно к разделу науки, получившему название системотехники (См. Системотехника). При широком толковании предмета К. значительная часть системотехники органически входит в нее. То же положение имеет место в электронной вычислительной технике. Разумеется, К. не занимается расчетами элементов ЭВМ, конструктивным оформлением машин, технологическими проблемами и т.п. Вместе с тем подход к ЭВМ как к системе, общеструктурные вопросы, организация сложных процессов переработки информации и управление этими процессами относятся по существу к прикладной К. и составляют один из её важных разделов.
Лит.: Винер Н., Кибернетика, пер. с англ., 2 изд., М., 1968; его же, Кибернетика и общество, пер. с англ., М., 1958; Цянь Сюэ-сэнь, Техническая кибернетика, пер. с англ., М., 1956; Эшби У. Р., Введение в кибернетику, пер. с англ., М., 1959: Глушков В. М., Введение в кибернетику, К., 1964.
В. М. Глушков.
Рис. к ст. Кибернетика.
II
Киберне́тика ("Киберне́тика",)
научный журнал Академии наук УССР. Издается в Киеве с 1965, выходит 6 раз в год. Публикует оригинальные статьи по математическим и прикладным проблемам кибернетики, а также обзоры новейших достижений советской и зарубежной кибернетики. Тираж (1973) около 4200 экземпляров.
Βικιπαίδεια
Кибернетика
Киберне́тика (от др.-греч. κυβερνητική «искусство управления») — наука об общих закономерностях получения, хранения, преобразования и передачи информации в сложных управляющих системах, будь то машины, живые организмы или общество.

Παραδείγματα από το σώμα κειμένου για кибернетика
1. Ирина окончила Московский университет по специальности кибернетика.
2. Чего мне только не называют - кибернетика, нанотехнологии, информационные системы...
3. Бурно развиваются генетика и кибернетика, признанные впоследствии лженауками.
4. - Но его увлекала не столько физика, сколько кибернетика.
5. Кибернетика означала (говоря грубо) создание систем преобразования и обработки информации.